
 Home
Home
 Robotics & Automation
Robotics & Automation
 About Grasp 10
About Grasp 10
 Demonstrations
Demonstrations
Demonstration Videos
You will need Adobe Flash Player 8 or above installed to view these demonstrations. This can be downloaded from Adobe's site at: http://www.adobe.com/products/flashplayer
Select the videos below to view illustrated simulations developed using Grasp10.
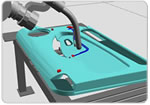
Door gluing application with a single robot keeping the tool perpendicular to the surface.
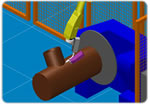
Pipe Welding application using a gantry robot to weld a saddle joint between two pipes.
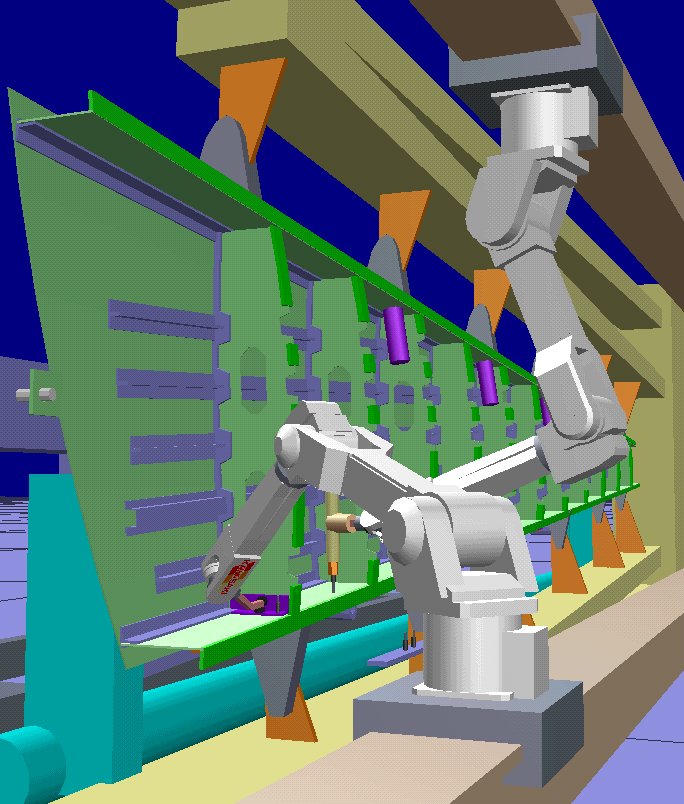
Riveting application using two robots to rivet a section of a ship.
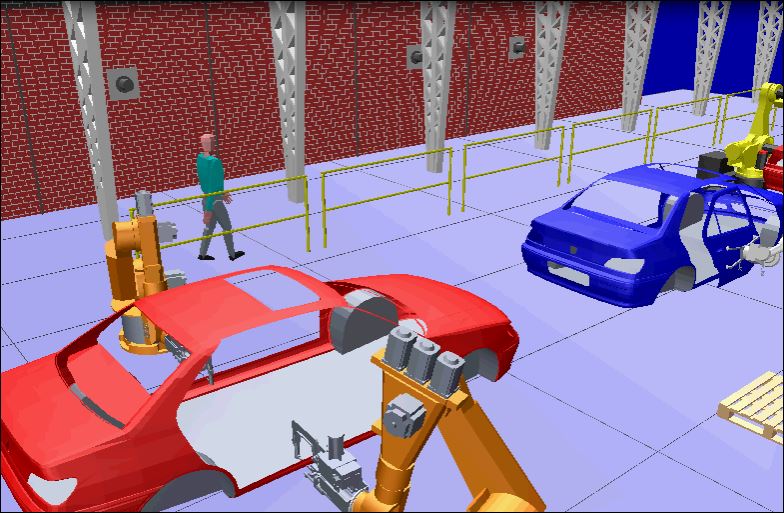
Production Line simulation for the automotive manufacturing industry.
Medical application with a robot manipulating components in an experimental clean room environment.
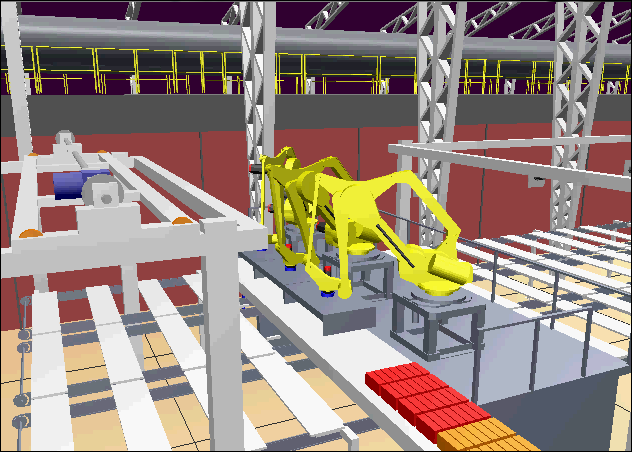
Brick Handling application with palletising robots working with a conveyor belt.
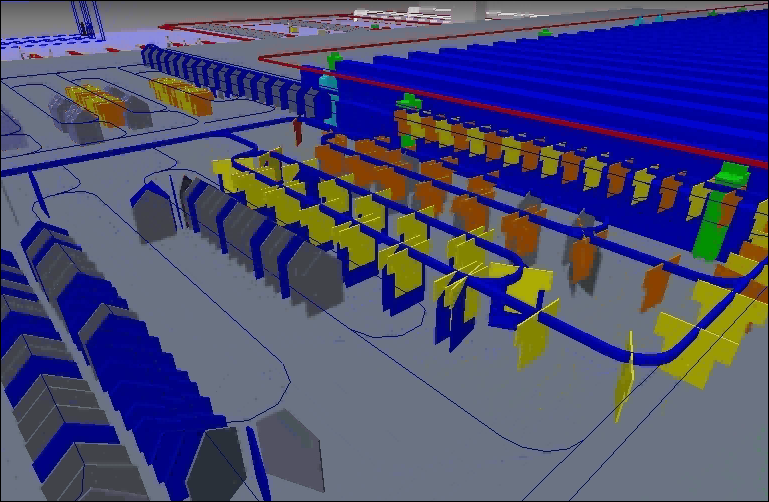
Warehouse simulation for design and optimisation of operations.
Garments simulation for movement of clothing through a warehouse.
Please note: the graphics in the above videos are of a lower quality that than those available in Grasp10. This is due to compression for display on the internet.

